
Projekt Pegasus: Galoppieren wie ein Pferd.
Der Roboter Pegasus, der von Studierenden der ETH Zürich während eines Forschungsprojekts ins Leben gerufen wurde, hat zwar keine Flügel wie das aus der griechischen Mythologie bekannte geflügelte Pferd. Dafür verfügt der autonome Roboter jedoch über starke Beine, die dank maxon-Motoren in der Lage sind, beinahe wie ein Pferd galoppieren zu können.
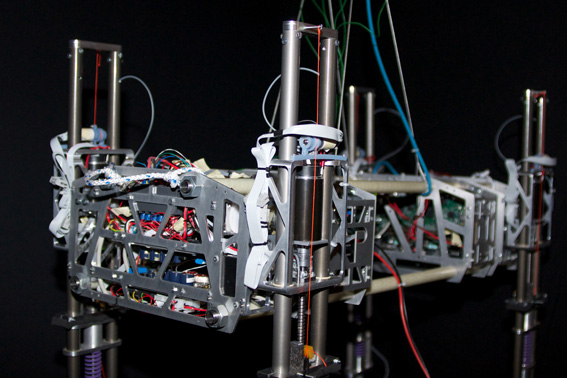
Im Rahmen eines Forschungsprojekts an der ETH Zürich wurde der autonome Roboter Pegasus geschaffen, der mit mithilfe seiner teleskopischen Beine sehr weite Strecken bewältigen kann. Die Beine sind für ein dynamisches Traben ausgelegt und können dank modernster Antriebstechnik mit geringem Energieverbrauch Höchstleistungen vollbringen. Pegasus ist modulartig aufgebaut und deshalb vielfältig einsetzbar. Jedes Modul besteht aus zwei Roboterbeinen. So kann man ihn als Zwei-, Vier- oder sogar Sechsbeiner auf die Reise schicken. Im Zeitrahmen des Projekts wurden insgesamt drei Module gebaut.
In dem Gemeinschaftsprojekt der ETH Zürich und der TU Delft (Holland) entwickelten zehn Maschinen-baustudenten – sechs Studenten der ETH Zürich und vier Studenten der TU Delft – gemeinsam in den letzten beiden Semestern ihres Bachelorstudiums den autonomen Roboter. Die Vorgabe war, dass dieser Roboter eine Entfernung von 10 Kilometern in weniger als 10‘000 Sekunden (2 h 47 min., ca. 3,6 km/h) mit einer einzigen Akkuladung zurücklegen kann. Voraussetzung dafür war, dass der Roboter äusserst energieeffizient gebaut sein muss und beispielsweise in der Lage ist mit Federn in den Beinen Energie zwischen zu speichern. Das Projekt wurde Ende 2010 ins Leben gerufen. Die ersten Hüpfversuche starteten im April 2011 – die Sprungfähigkeit wurde zunächst nur mit einem Bein ausgiebig getestet. In jedem Bein treibt ein DC RE40 maxon Motor die Spindel an, welche für das Ein-und Ausfahren des Beines verantwortlich ist. Zusätzlich betätigt ein EC-4pole Motor den Drehfreiheitsgrad im Hip-Modul (Verbindungsteil zwischen zwei Beinmodulen). Durch den 200 Watt starken Motor ist es also erst möglich, dass sich das ganze Bein drehen kann.
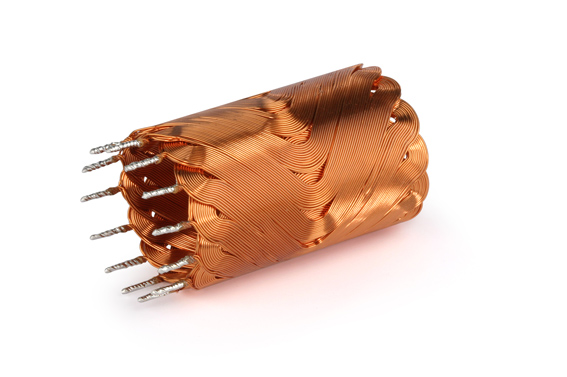
Dank der speziellen Wicklungstechnologie und den vierpoligen Magneten sind die maxon EC-4pole-Antriebe unschlagbar, wenn es um höchste Leistung pro Volumen- und Gewichtseinheit geht. Die Motoren haben kein Rastmoment, einen hohen Wirkungsgrad von über 90 Prozent und eine ausgezeichnete Regeldynamik. Das Metallgehäuse gewährt gute Wärmeabfuhr und mechanische Stabilität. Auch bezüglich der Lebensdauer suchen die Antriebe ihresgleichen.
Die Steuerung
Für die Steuerung des Pegasus-Roboters wurden zwei verschiedene Positionssteuerungen eingesetzt. Zum einen die EPOS 24/2 Steuerung, die für die Ansteuerung von zusätzlichen Sensoren-Schnittstellen genutzt wird. Diese Positionssteuerung wurde, wie alle anderen EPOS-Produkte von maxon, speziell für die Kommandierung und Steuerung in CANopen-Netzwerken entwickelt. Zudem wurde diese Steuerung mit sehr guten Motion Control-Funktionalitäten ausgerüstet. Mit dem «Interpolated Position Mode» (PVT) ist die Positioniersteuerung in der Lage, eine durch Stützpunkte vorgegebene Bahn synchron abzufahren. Zum anderen kommt die EPOS2 70/10 Steuerung zum Einsatz, welche speziell abgestimmt ist auf bürstenbehaftete DC-Motoren mit Encoder oder bürstenlose EC-Motoren mit Hall-Sensoren und Encoder von 80 bis 700 Watt. Die Steuerung sorgt im Pegasus-System zum einen für die Drehmomentregelung (Current Mode) der EC-4pole Motoren und zur Geschwindigkeitsregelung (CANopen Profile Velocity Mode) der eingesetzten RE-Motoren. Im Current Mode kann ein konstantes Moment an der Motorwelle geregelt werden. Und beim „CANopen Profile Velocity Mode“ wird die Motorachse mit einer vorgegebenen Sollgeschwindigkeit bewegt.
Das ursprüngliche Ziel des Projektes wurde aufgrund des eng gesteckten Zeitrahmens nicht erreicht. Verschiedene Teile des Roboters waren in ihrer Funktionalität nicht perfekt aufeinander abgestimmt, erklärt Steve Heim, ehemaliger Student und Projektmitglied Pegasus. Das Projekt wird im Autonomous Systems Lab (ASL) an der ETH Zürich weiterverfolgt. Seit Ende letzten Jahres arbeiten Praktikanten des ASL an der erfolgreichen Umsetzung des Projekts. Inzwischen hat Pegasus in der Zweibeiner-Konfiguration erste stabile Sprünge machen können. Das gesteckte Ziel eine Entfernung von 10 Kilometern in weniger als 10‘000 Sekunden mit einer einzigen Akkuladung zurückzulegen ist zum Greifen nah.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}